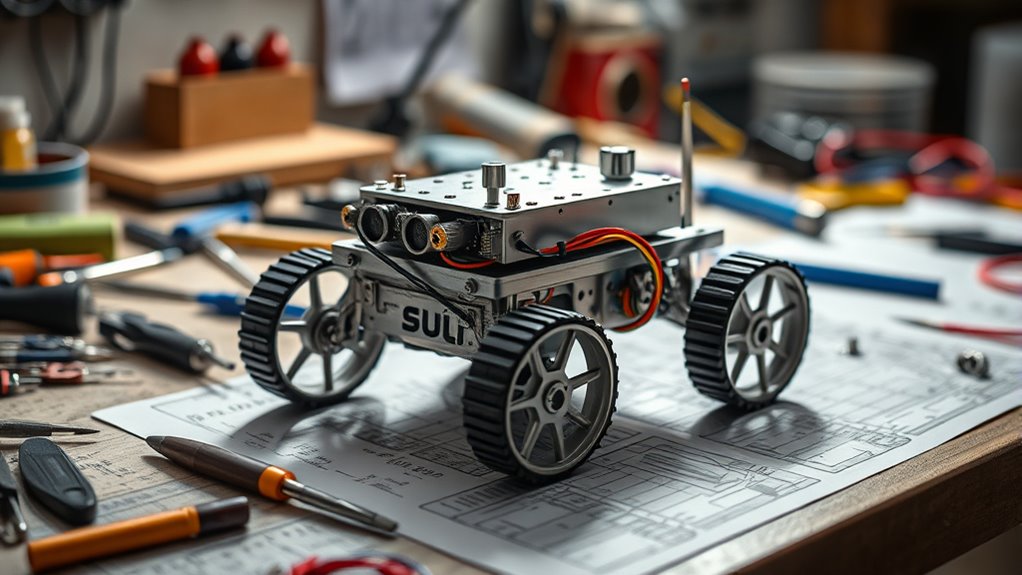

Student engineers have unveiled a gerbil-inspired lunar rover prototype that showcases innovative, agile mobility for maneuvering rocky lunar surfaces. Inspired by small creatures’ adaptability, the design allows the rover to hop, crawl, and maneuver over challenging terrain with ease. Its lightweight materials and modular setup make it efficient and upgrade-friendly. If you keep exploring, you’ll discover how this tiny creature-inspired breakthrough could transform future space exploration technologies.
Key Takeaways
- Student engineers developed the Gerbil Moon Rover Prototype, inspired by small animals’ agility for lunar exploration.
- The rover features hopping, crawling, and obstacle navigation capabilities suited for uneven lunar terrain.
- It uses lightweight, modular design with sensors and communication systems for real-time data transmission.
- The project highlights biomimicry, leveraging natural animal movements to improve robotic mobility on the moon.
- This innovation aims to enhance exploration efficiency, resilience, and cost-effectiveness in future space missions.
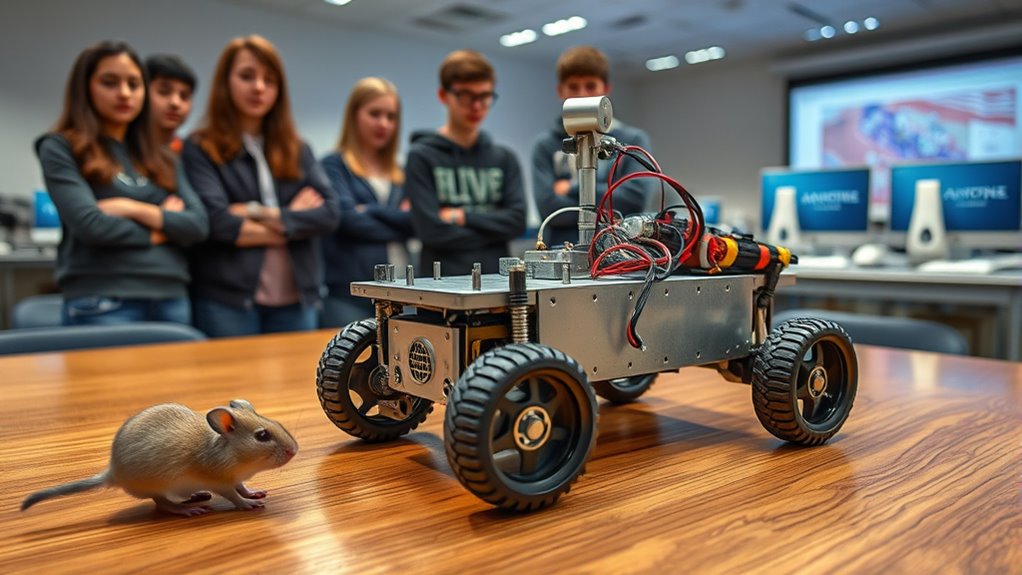
Have you ever wondered how small creatures might inspire the future of space exploration? Well, a team of student engineers just proved that even the tiniest animals can influence big innovations. They recently revealed the Gerbil Moon Rover Prototype, a compact and agile vehicle designed to enhance lunar exploration technology. This innovative project highlights how robotic mobility inspired by nature can revolutionize how we explore the Moon’s rugged terrain.
Small creatures inspire big innovations in lunar exploration with the Gerbil Moon Rover Prototype.
The Gerbil Moon Rover isn’t just a cute concept; it’s a serious step toward improving robotic mobility in space. Its design mimics the agility and adaptability of small creatures, allowing it to navigate uneven, rocky surfaces with ease. This focus on mobility is vital because traditional rovers often struggle with the unpredictable lunar landscape. By studying animal movements, the student engineers optimized the rover’s ability to hop, crawl, and maneuver over obstacles, making it more versatile than conventional models. This approach could lead to more efficient exploration missions, where robots can swiftly adapt to new environments and carry out tasks with minimal human intervention.
In terms of lunar exploration technology, the Gerbil Moon Rover pushes boundaries by integrating lightweight materials and simple yet effective mechanical systems. Its compact size means it consumes less power, which is a significant advantage on the Moon, where energy sources are limited. Plus, its modular design allows for easy upgrades or repairs, ensuring longevity and adaptability during extended missions. The rover’s sensors and communication systems are tailored to operate efficiently in the Moon’s harsh conditions, providing real-time data to scientists back on Earth. These features demonstrate how innovative, nature-inspired engineering can make space exploration more sustainable and cost-effective.
You might also appreciate how this project emphasizes the importance of student-led innovation. It shows that with creativity and dedication, young engineers can contribute meaningful advancements to space technology. The Gerbil Moon Rover Prototype embodies a fresh perspective—using biomimicry to solve complex challenges and improve robotic systems. Its development underscores the potential for future lunar exploration tools that are not only functional but also adaptable, durable, and energy-efficient.
In essence, this tiny rover is more than just a prototype; it’s a glimpse into the future of space exploration, where inspiration from the natural world drives technological breakthroughs. As you think about the possibilities, it’s clear that even the smallest creatures can have a big impact, especially when their natural abilities are harnessed to develop smarter, more resilient lunar exploration technology. The Gerbil Moon Rover proves that innovation often starts with observing and learning from the smallest details around us. Incorporating interior design principles into engineering models can also enhance functionality and user experience in space habitats, highlighting the interdisciplinary nature of innovation.

SunFounder GalaxyRVR Mars Rover STEM Kit for Arduino, Compatible with Uno R3, Rocker-Bogie Suspension,Scratch,C,Camera, FPV, Rechargeable Battery, for Students, Educators, Engineers
Mars Exploration Made Easy: GalaxyRVR, compatible with Arduino Uno R3, recreates the experience of real Mars rovers. Inspired…
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Frequently Asked Questions
What Inspired Students to Create This Moon Rover Prototype?
You might find that the students drew inspiration from biomimicry, observing how animals adapt and move efficiently. Their innovation aims to replicate these natural strategies, pushing the boundaries of space exploration. You can see how their creative thinking combines science and nature, leading to a unique moon rover prototype. This student innovation showcases their passion for solving real-world challenges by learning from the environment and applying those lessons to space technology.
How Does the Gerbil Mechanism Enhance the Rover’s Mobility?
You might think a gerbil mechanism sounds unusual, but it’s a brilliant biomechanical innovation that boosts mobility mechanics. By mimicking a gerbil’s agile leg movements, the rover gains enhanced stability and adaptability on uneven lunar terrain. This design allows for smoother navigation, overcoming obstacles with ease. The active, dynamic motion inspired by nature’s engineers guarantees your rover can explore more efficiently, demonstrating how creative biomechanical solutions revolutionize space exploration.
What Materials Were Used to Build the Prototype?
You’ll find that the prototype uses lightweight construction materials like aluminum and high-strength plastics to guarantee a lightweight design, which improves mobility and efficiency. These materials are chosen for their durability and ease of shaping, making the rover sturdy enough for rough terrain while keeping it manageable in weight. This careful selection allows the rover to perform effectively during simulated lunar missions, demonstrating the importance of smart material choices in space exploration tech.
Are There Plans to Test the Rover in Space Environments?
You’re curious if they plan to test the rover in space environments. They do intend to conduct future testing using space simulation to replicate conditions like vacuum, radiation, and temperature extremes. This step helps make certain the rover can withstand real space conditions. The team aims to refine the design through these tests, increasing the chances of success before any actual space deployment, making it a vital part of their development process.
How Does This Prototype Compare to Professional Moon Rovers?
You might wonder how this prototype stacks up against professional moon rovers. While it showcases impressive robotic autonomy for a student project, it likely falls short in durability and advanced features. A thorough cost analysis reveals it’s more affordable but less sophisticated. Compared to professional models, it’s a promising start, but it still needs significant upgrades to handle the harsh lunar environment effectively.

VkotaVkoty 2026 Upgraded Mini Pocket Robot for Kids 3+, Interactive Toy Robot with Voice Dialogue Singing Dancing Story Telling, Cute Mini Desk Robot Friend, Portable Robots Birthday Gift for Ages 3+
[Upgraded Interactive Pocket Robot for Endless Fun] This upgraded toy robot is specially designed for kids aged 3-10…
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Conclusion
So, after all your hard work, you’ve built a tiny moon rover for gerbils—fittingly, a true leap for rodent-kind. Ironically, this small-scale prototype might just inspire real space exploration someday, proving that even the tiniest creatures can spark big ideas. Who knew that a simple project would remind you that innovation often starts with the smallest steps? Maybe someday, gerbils will be the first to explore the moon’s surface—talk about a cosmic twist.

MUKIKIM NASA Future Explorers – Perseverance Mars Rover. Build & Learn STEM Education & Interactive Space Exploration for Kids. with Powerful Motor & Movable Robotic Arm!
IGNITE SPACE EXPLORATION PASSION: Dive into the world of Martian engineering with the Perseverance Mars Rover, an immersive…
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.

Robotics Kit for Kids Ages 8–12 12-16, ACEBOTT Smart Robot Car Kit with 3MP Camera, STEM Toys for Boys Compatible with Arduino & Scratch,App & Remote Control,STEM Gift for Boys, Girls,Teens and Adults
See What Your Robot Sees. This STEM robot kit includes a built-in 3-megapixel HD camera that streams real-time…
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.







